Sự khác biệt giữa tốc độ của từ trường và tốc độ của Rotor được gọi là độ trượt (hệ số trượt), kí hiệu s.
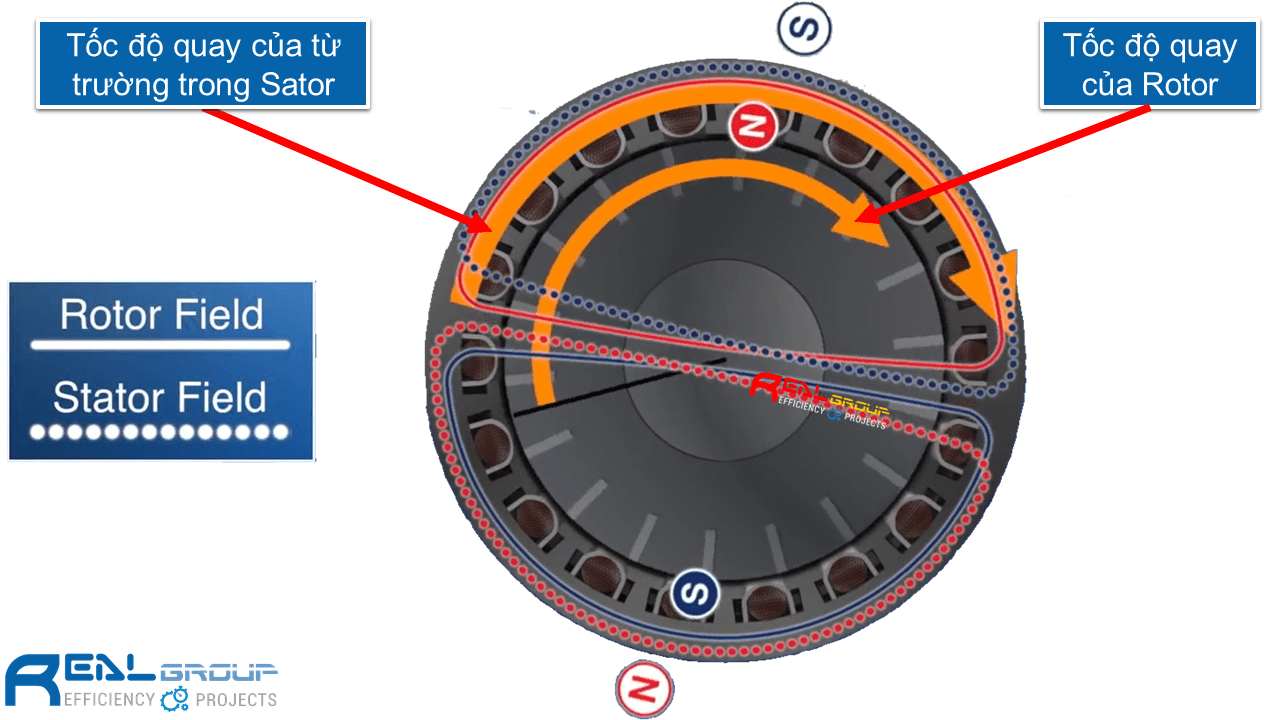
Hình 1. Độ trượt là sự chênh lệch giữa tốc độ từ trường và tốc độ Rotor.

1. Một số thuật ngữ
Để giúp các bạn hiểu thêm về phần này thì chúng ta hãy cùng xác định một số thuật ngữ bạn phải biết sẽ được dùng trong bài viết này.
1.1. Tốc độ đồng bộ (tốc độ từ trường)



1.2. Tốc độ Rotor (tốc độ định mức)
Tốc độ cơ học của Rotor được gọi là tốc độ định mức. Tốc độ định mức dựa trên tải trọng định mức của động cơ.
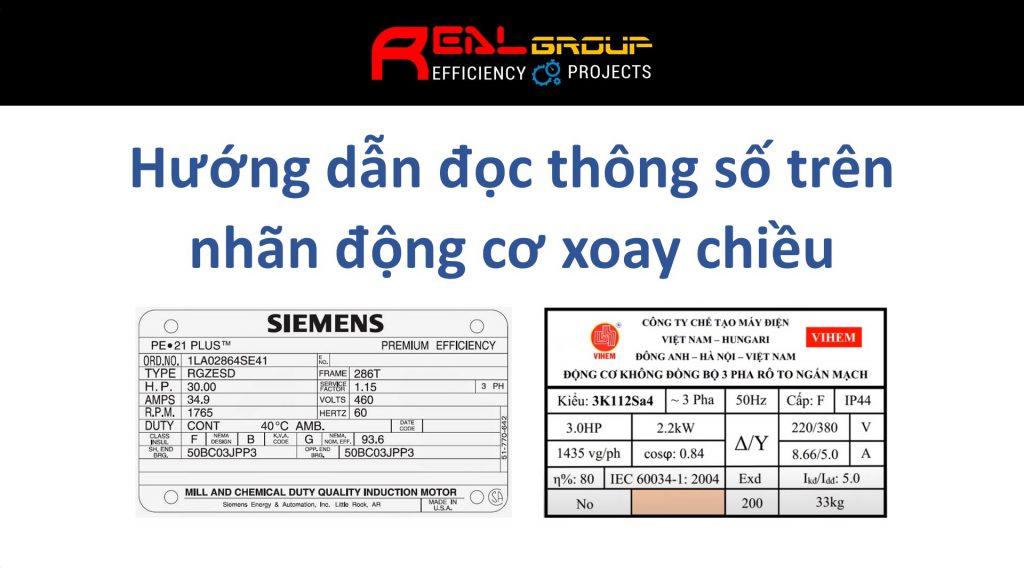
 Hình 2. Nhãn của động cơ cảm ứng 3 pha.
Hình 2. Nhãn của động cơ cảm ứng 3 pha.
Dựa vào hình 2 ở trên, ta thấy được giá trị tốc độ định mức trên nhãn của động cơ cho biết tốc độ chung của tải định mức.
Ta xem lại ví dụ một động cơ 4 cực (2 cặp cực) được kết nối với một dòng điện có tần số 60 Hertz sẽ có tốc độ đồng bộ là 1800 vòng/phút (rpm), tốc độ định mức của động cơ sẽ nằm trong khoảng 1725 đến 1750 vòng/phút.
Vì vậy, ta suy ra rằng đối với động cơ cảm ứng xoay chiều thì Rotor luôn quay chậm hơn từ trường của Stator.
2. Hệ số trượt
Sự khác biệt giữa tốc độ đồng bộ (tốc độ từ trường quay) của Stator và tốc độ cơ học của Rotor được gọi là độ trượt (hệ số trượt).
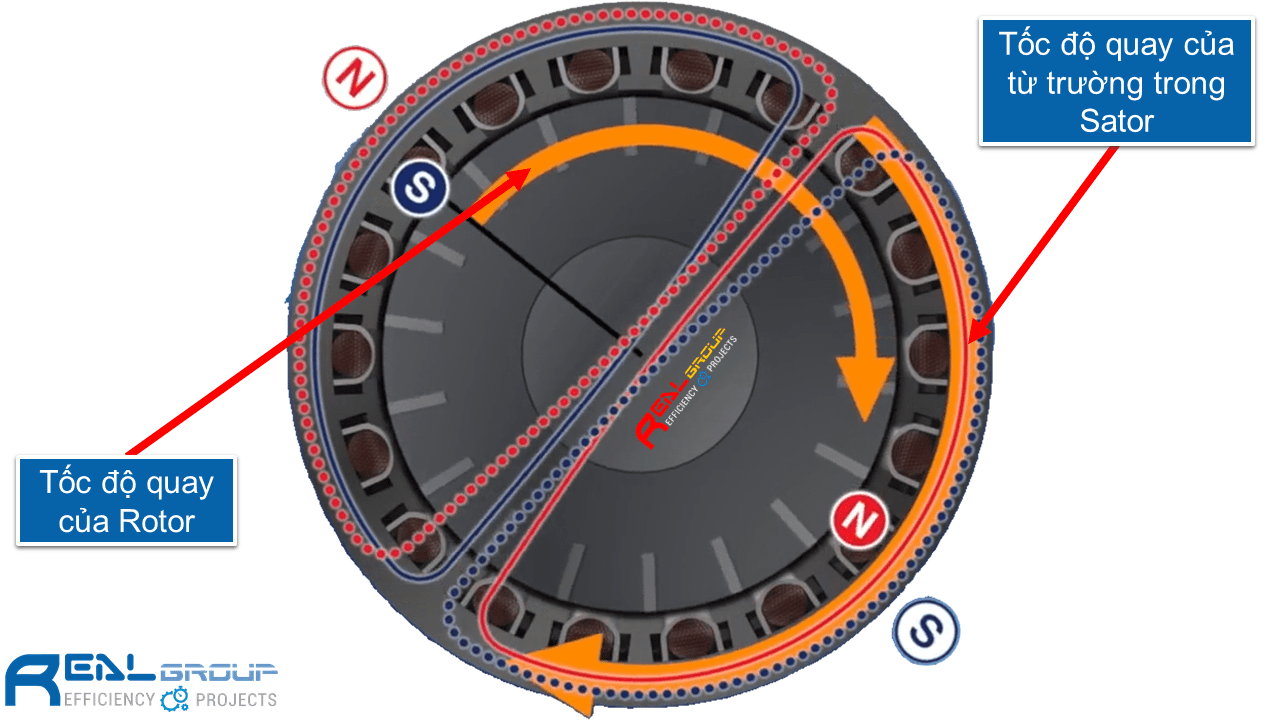
Lượng trượt phụ thuộc vào lượng tải của động cơ. Tải trọng trên động cơ càng lớn thì Rotor quay càng chậm so với tốc độ quay của Stator.
Hình 3. Tốc độ quay của Rotor chậm hơn rất nhiều so với tốc độ quay của từ trường.

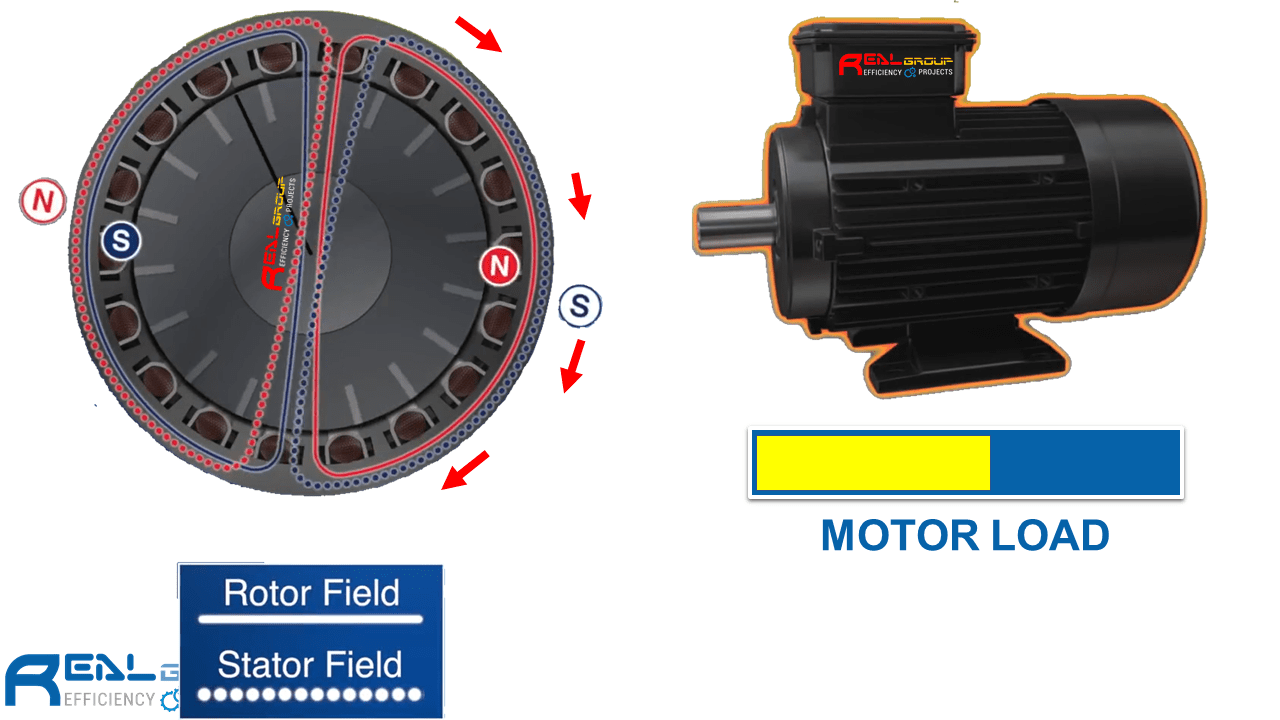
Hình 4. Khi tải nhẹ, tốc độ Rotor rất nhanh.
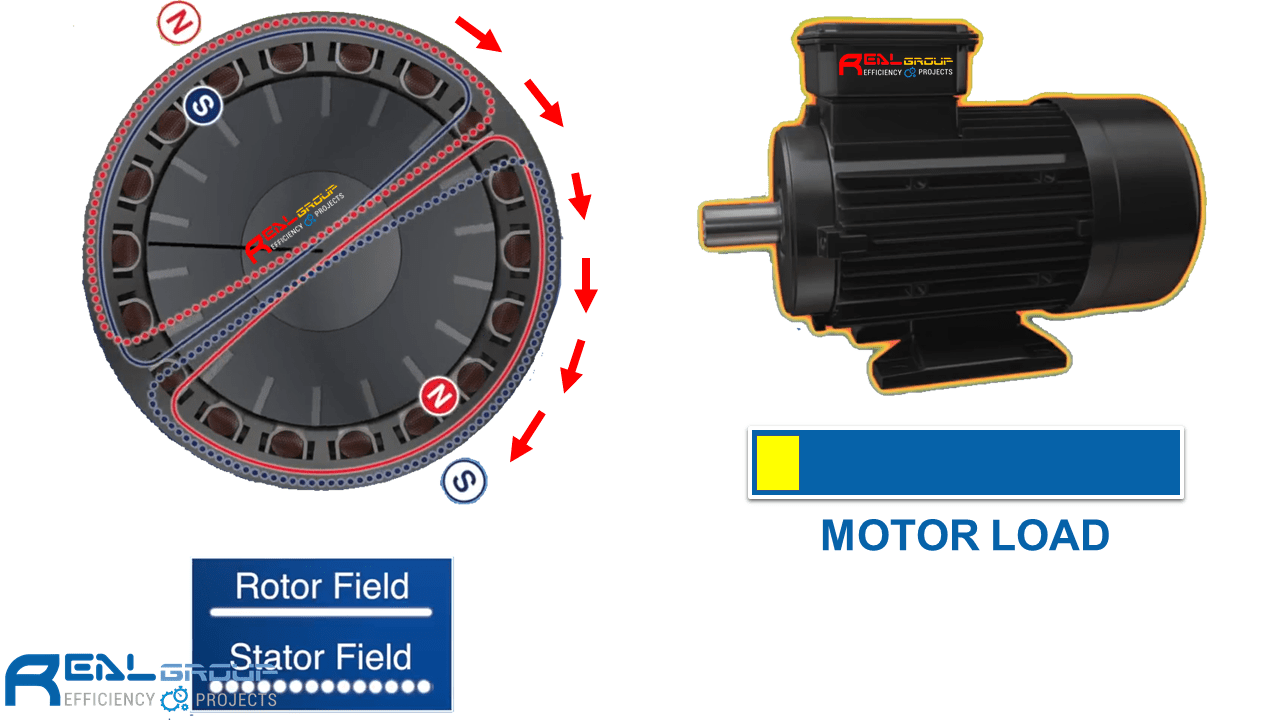
Hình 5. Khi tăng tải thì tốc độ Rotor chậm dần.
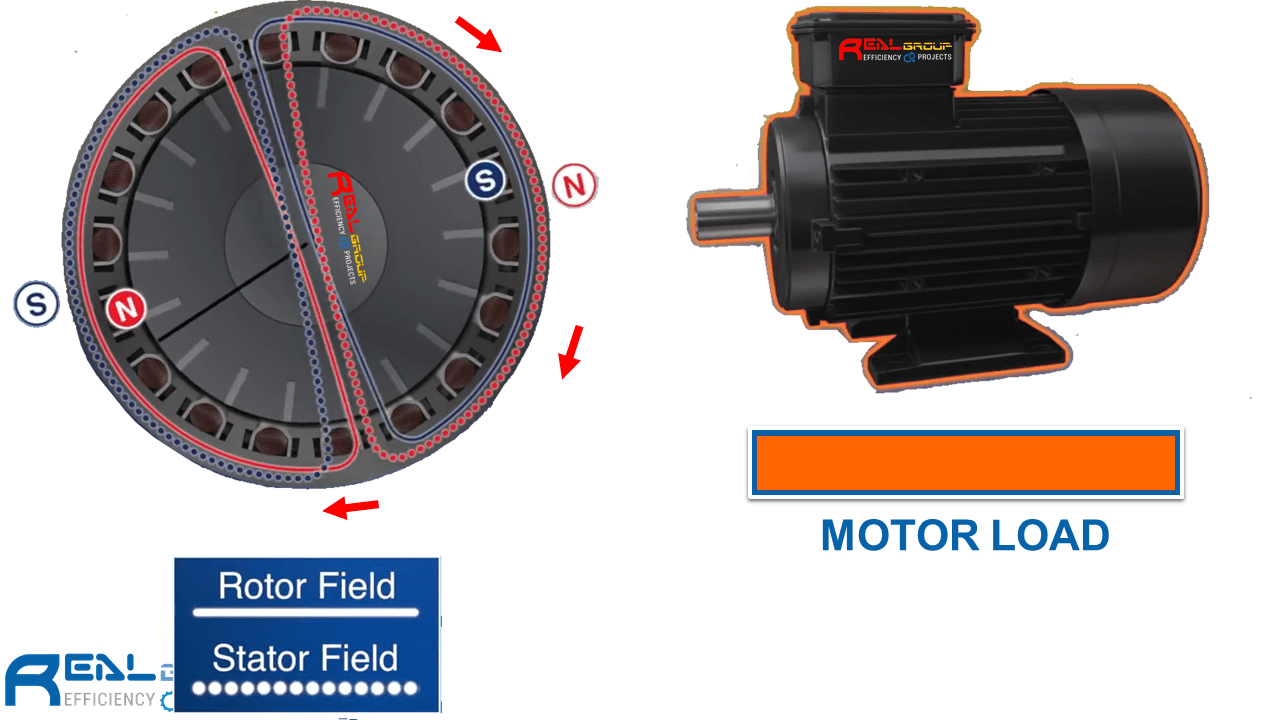
Hình 6. Khi đầy tải thì tốc độ Rotor chậm nhất.
Vậy tóm lại, sự tăng hoặc giảm tốc độ động cơ do tải gọi là trượt.