Khi nghiên cứu về động cơ không đồng bộ ba pha, thì ta cần phải hiểu các định nghĩa về đặc tính cơ trong khi vận hành của động cơ không đồng bộ để từ đó ta có thể hiểu hơn về đặc tính cơ tự nhiên, đặc tính cơ nhân tạo, các thông số nào sẽ ảnh hưởng đến đặc tính cơ trong động cơ không đồng bộ ba pha. Vậy trong khi vận hành động cơ không đồng bộ ba pha thì đặc tính cơ sẽ thể hiện những gì? Ta sẽ cùng tìm hiểu ở bài viết này.
1. Đặc tính cơ
Đặc tính cơ của động cơ điện là quan hệ giữa tốc độ quay và momen của động cơ.

Hình 1. Đặc tính cơ của động cơ không đồng bộ ba pha.
Trong đó:
- ns: tốc độ stator (tốc độ từ trường quay).
- n: tốc độ của động cơ (tốc độ của rotor).
- nd: momen tới hạn.
- locked-rotor torque: điểm khởi động.
- pull-up torque: momen kéo tải.
- breakdown torque: momen tới hạn.
- full load: điểm đầy tải.
M = f(ω) hoặc ω = f(M), bao gồm đặc tính cơ tự nhiên và đặc tính cơ nhân tạo.
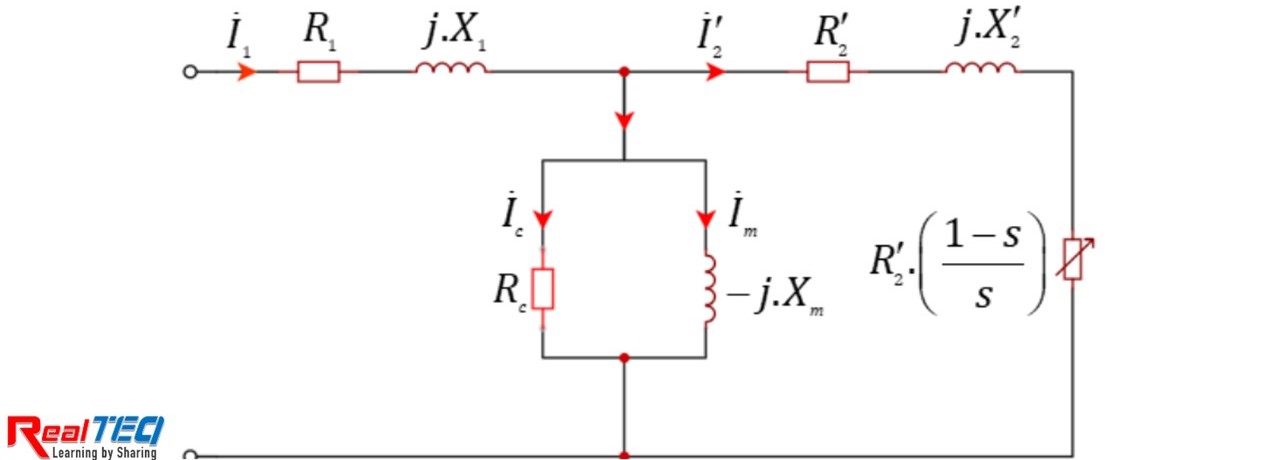
Hình 2. Sơ đồ thay thế của động cơ không đồng bộ ba pha.
Trong đó:
- U1: Trị số hiệu dụng điện áp pha ở stator.
- I1, Im, I2: là trị số dòng điện stator, dòng từ hoá, dòng điện rotor quy đổi về stator.
- R1, Rc, R’2: là trị số điện trở stator, điện trở mạch từ hoá, điện trở rotor quy đổi về stator.
- X1, Xm, X’2: là trị số điện kháng stator, điện kháng mạch từ hoá, điện kháng rotor qui đổi về stator.
- R: điện trở phụ thêm vào mỗi pha của rotor.
- s: độ trượt của động cơ.
Từ sơ đồ thay thể ta có trị số hiệu dụng gần đúng của dòng điện stator:
{I_1} = {U_1}\left[ {\frac{1}{{\sqrt {R_c^2 + X_m^2} }} + \frac{1}{{\sqrt {\left( {{R_1} + {{R'}_2}/s} \right) + X_{nm}^2} }}} \right]Trong đó:
- R’2 = R2 + R’f : điện trở rotor quy đổi về stator.
- Xnm = X1 + X’2: điện kháng ngắn mạch.
Từ biểu thức trên ta thấy được:
ω = 0; s = 1 ⇒ I1 = Inm: dòng điện ngắn mạch của stator.
Và
\omega = {\omega _0};s = 0 \Rightarrow {I_1} = {U_1}.\left[ {\frac{1}{{\sqrt {R_c^2 + X_m^2} }}} \right] = {I_\mu }Trị số dòng điện quy đổi về stator là:
{I'_2} = \frac{{{U_1}}}{{\sqrt {\left( {{R_1} + {{R'}_2}/s} \right) + X_{nm}^2} }}Khi khởi động (ω = 0; s = 1):
{I'_2} = \frac{{{U_1}}}{{\sqrt {{{\left( {{R_1} + {{R'}_2}} \right)}^2} + X_{nm}^2} }} = {I'_{2nm}}2. Đặc tính cơ của động cơ
Động cơ cảm ứng được dùng để thực hiện công việc hoàn thành một nhiệm vụ mang tính cơ học nào đó. Khi động cơ cảm ứng hoạt động nó sẽ sử dụng năng lượng điện để tạo ra momen cần thiết.
Đặc tính cơ của động cơ sẽ cho chúng ta thấy momen được tạo ra như thế nào khi một động cơ cảm ứng thay đổi cách hoạt động trong suốt các giai đoạn khác nhau.

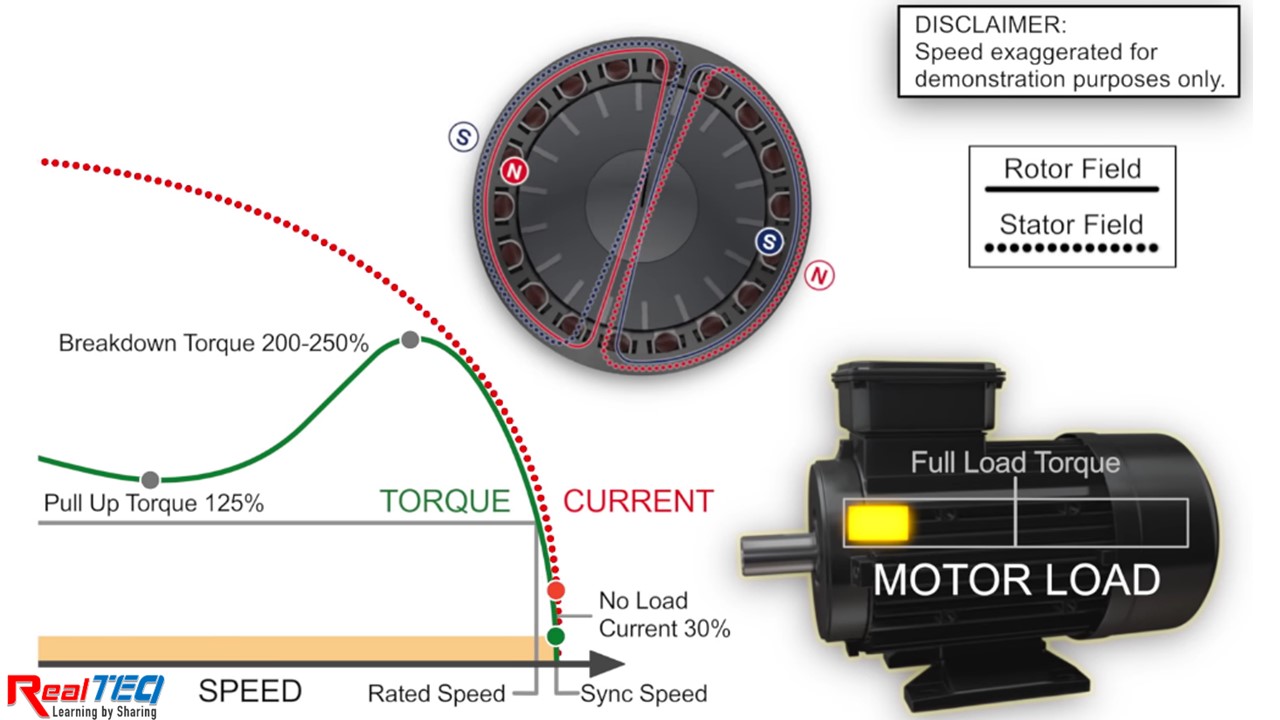
Hình 3. Đặc tính cơ của động cơ.
Momen khởi động là lượng momen mà động cơ cảm ứng tạo ra khi nó tăng tốc từ vị trí đứng yên.
Nhìn vào hình bên dưới, momen khởi động đạt 150% momen định mức.

Hình 4. Đường cong của momen khởi động.
Pull up Torque (tạm gọi là Momen kéo tải) là lượng momen dùng để tăng tốc động cơ về tốc độ định mức của nó. Nếu momen của động cơ nhỏ hơn momen cần thiết để tăng tốc kéo tải thì tốc độ của động cơ không thể nào đạt đến tốc độ định mức.
Khi động cơ tiếp tục tăng tốc về tốc độ định mức thì nó sẽ đạt đến một giá trị gọi là momen tới hạn (Breakdown torque).

Hình 5. Momen tới hạn của động cơ.
Momen tới hạn là lượng momen lớn nhất mà động cơ có thể tạo ra. Hay nói cách khác, tại đây sẽ sinh ra một lực xoắn lớn nhất và một động cơ điện tạo ra với điện áp tương ứng được dùng ở tần số tương ứng mà không có sự suy giảm bất thường trong tốc độ.
Khi động cơ tăng tốc đến tốc độ định mức của nó, momen động cơ lúc này bằng khoảng 80% đến 100% momen định mực của nó. Đó là điều tất nhiên nếu như động cơ được thế kế đúng.

Hình 6. Momen của động cơ khi tăng tốc đến tốc độ định mức.
2.1. Từng trường hợp của tải làm cho momen thay đổi
2.1.1. Trường hợp 1
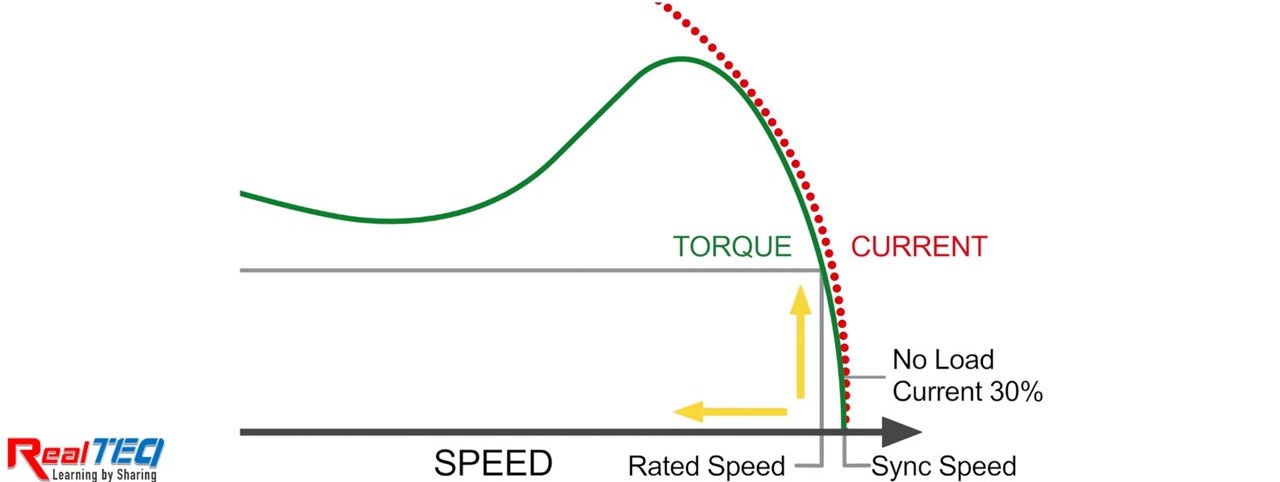
Hình 7. Momen của động cơ bị thay đổi khi tải tăng.
Khi tải được tăng lên, tốc độ động cơ giảm kéo theo momen của động cơ sẽ tăng. Từ đó, ta có thể thấy được momen và dòng điện tỉ lệ thuận với nhau; điều đó có nghĩa là một động cơ cảm ứng sẽ có dòng điện lớn hơn khi tăng tải. Vì vậy, khi tải tăng nó sẽ tăng lượng dòng điện mà động cơ sinh ra đồng thời một lượng momen cũng được tạo ra.

Hình 8. Khi tải tăng thì momen và dòng điện cũng tăng theo.
2.1.2. Trường hợp 2
Giả sử tải trở nên rất lớn, lớn đến mức làm cho momen động cơ tạo ra gần bằng với giá trị của momen tới hạn (Mth).
Hình 9. Khi tải vừa bắt đầu tăng.

Hình 10. Khi tải tăng đến mức giữa.
Chúng ta có thể thấy rằng khi tải càng tăng thì momen cũng tăng theo đường cong này (như hình trên), bởi vì lúc này tốc độ của động cơ giảm và dòng điện trong động cơ bắt đầu tăng dần.
Dòng điện trong Rotor bắt đầu giảm khi Rotor đạt trạng thái bão hoà. Điều này làm rời rạc (phân rã) các từ trường trong Rotor, làm cho Rotor quay chậm lại hoặc ngừng hoạt động.

Hình 11. Momen của động cơ khi đầy tải.
3. Cách xây dựng phương trình đặc tính cơ điện
Để tìm phương trình đặc tính cơ ta xuất phát từ điều kiện cân bằng công suất trong động cơ, công suất điện từ chuyển từ stato sang rotor:
Pđt = ω0.Mđt
Trong đó Mđt là momen điện từ của động cơ. Nếu bỏ qua các tổn thất phụ thì ta có:
Mđt = Mco = M
Khi thay thế vào ta có phương trình đặc tính cơ như sau:
M = \frac{{3.U_1^2.{{R'}_2}}}{{{\omega _0}.s\left[ {{{\left( {{R_1} + {{R'}_2}/s} \right)}^2} + X_{nm}^2} \right]}}Mối quan hệ M = f (ω) là một đường cong có cực trị, dạng của nó được biểu diễn:

Hình 12. Mối quan hệ giữa momen và tốc độ góc.
Độ trượt tới hạn sth:
{s_{th}} = \pm \frac{{{{R'}_2}}}{{\sqrt {R_1^2 + X_{nm}^2} }}Momen tới hạn Mth:
{M_{th}} = \pm \frac{{U_{1f}^2}}{{2{\omega _0}\left( {{R_1} \pm \sqrt {R_1^2 + X_{nm}^2} } \right)}}Phương trình đặc tính cơ còn có thể viết theo CLOSS:
M = \frac{{2.{M_{th}}.\left( {1 + a.{s_{th}}} \right)}}{{\left( {s/{s_{th}}} \right) + \left( {{s_{th}}/s} \right) + 2.a.{s_{th}}}}\left( {a = \frac{{{R_1}}}{{{{R'}_2}}}} \right)Đối với động cơ không đồng bộ công suất lớn, thường R1 < R’2 nên ta có thể bỏ qua R1 và a.sth » 0 khi đó ta có dạng CLOSS đơn giản hơn:
M = \frac{{2.{M_{th}}}}{{\left( {s/{s_{th}}} \right) + \left( {{s_{th}}/s} \right)}};\left( {a = \frac{{{R_1}}}{{{{R'}_2}}}} \right)M = \pm \frac{{U_{1f}^2}}{{2{\omega _0}.{X_{nm}}}}{s_{th}} = \pm \frac{{{{R'}_2}}}{{{X_{nm}}}}Động cơ điện không đồng bộ có cấu tạo và cách vận hành rất đơn giản, giá thành lại rẻ, làm việc hiệu quả nên được sử dụng nhiều trong sản xuất công nghiệp và đời sống. Động cơ điện không đồng bộ thường bao gồm các loại: động cơ 3 pha, động cơ 2 pha và động cơ 1 pha.
4. Các thông số ảnh hưởng tới đặc tính cơ
4.1. Ảnh hưởng của thông số điện áp lưới
Khi điện áp thay đối độ trượt tới hạn của động cơ không thay đối, còn momen tới hạn của động cơ thay đối thì tỷ lệ với bình phương của điện áp lưới là:
{s_{th}} = \pm \frac{{{{R'}_2}}}{{{X_{nm}}}} = const{M_{th}} = \pm \frac{{3.U_1^2}}{{2.{\omega _0}.{X_{nm}}}} = {\mathop{\rm var}}Nếu điện áp đặt vào động cơ giảm quá thấp có thể làm cho momen khởi động của động cơ giảm thấp và động cơ sẽ không khởi động được.
Khi giảm áp ta sẽ thu được một họ đường đặc tính cơ như sau:
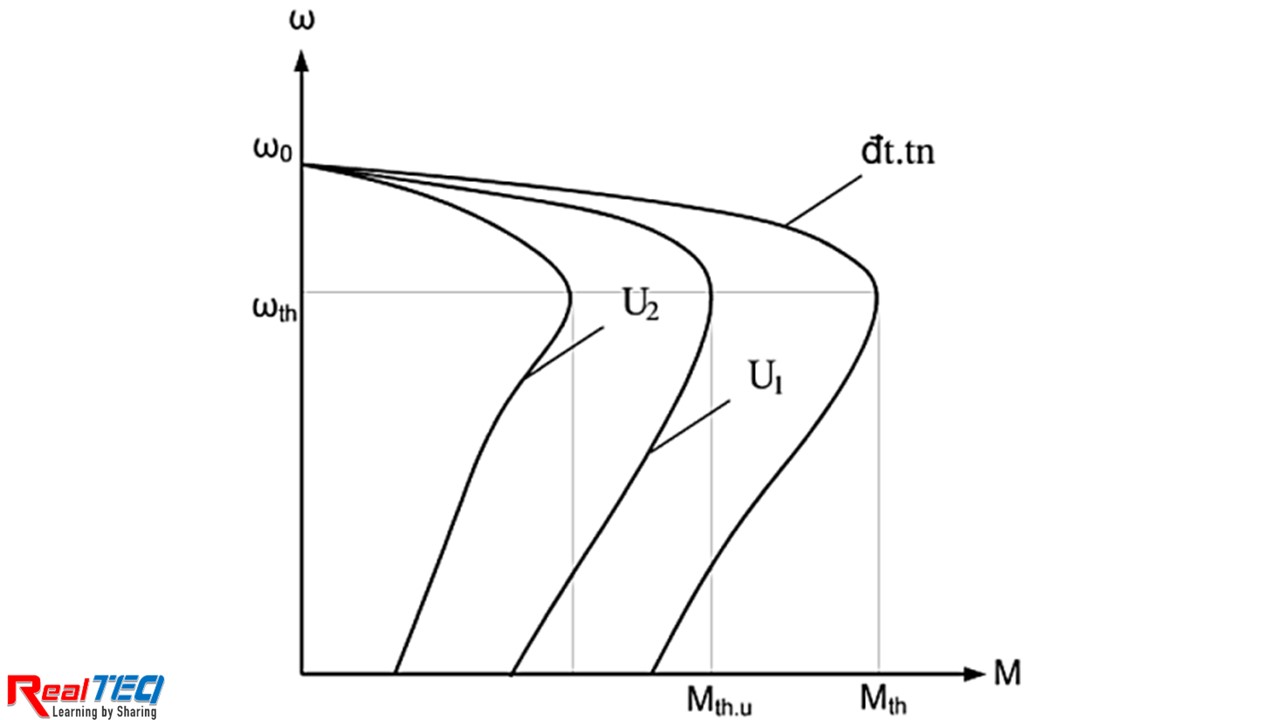 Hình 13. Đặc tính cơ khi giảm điện áp lưới.
Hình 13. Đặc tính cơ khi giảm điện áp lưới.
4.2. Ảnh hưởng của thông số điện trở phụ mạch rotor, điện kháng mạch stator
Khi thay đổi điện trở mạch rotor thì độ trượt tới hạn của động cơ thay đổi, còn momen tới hạn của động cơ không thay thay đổi.
{s_{th}} = \pm \frac{{{{R'}_2}}}{{{X_{nm}}}} = {\mathop{\rm var}}{M_{th}} = \pm \frac{{3.U_1^2}}{{2.{\omega _0}.{X_{nm}}}} = constĐường đặc tính thu được khi thay đổi như sau:
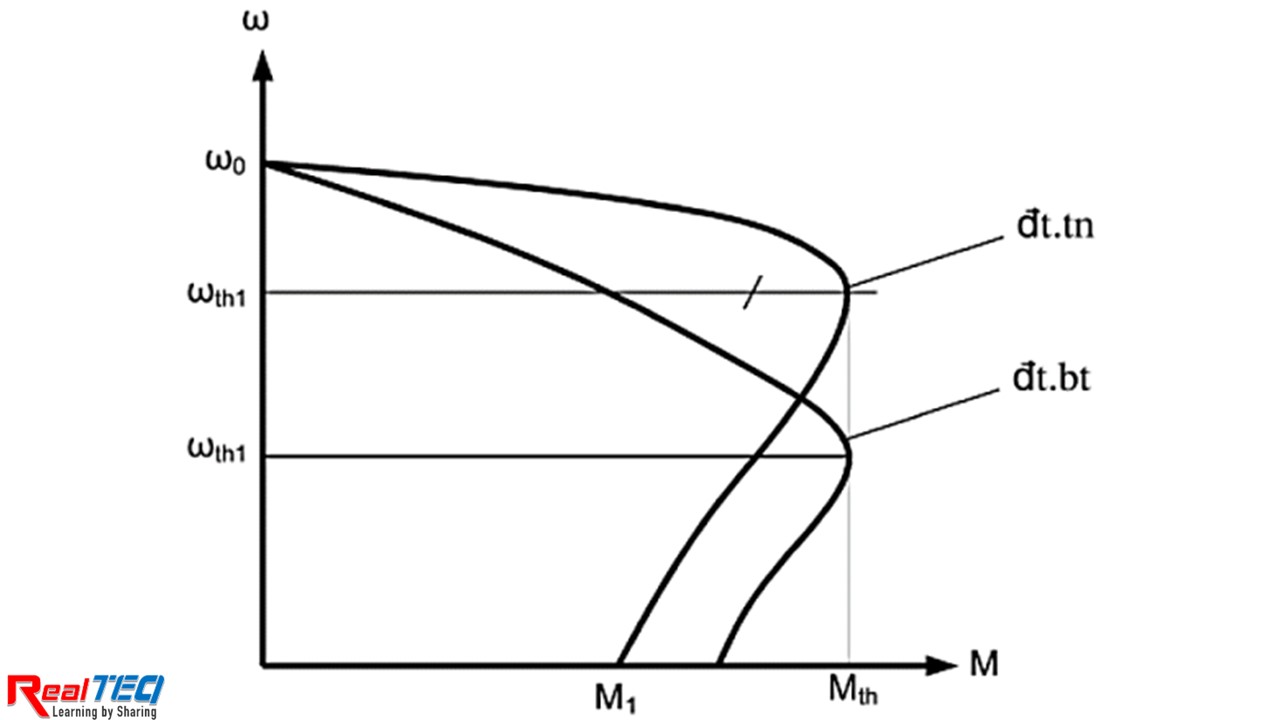
Hình 14. Đặc tính cơ khi thay đổi điện trở phụ, điện kháng mạch stator.
4.3. Ảnh hưởng của thông số tần số nguồn điện
Nếu cung cấp cho động cơ bằng một nguồn điện có tần số thay đổi thì tốc độ động cơ thay đổi và dạng đặc tính cơ cũng thay đổi.
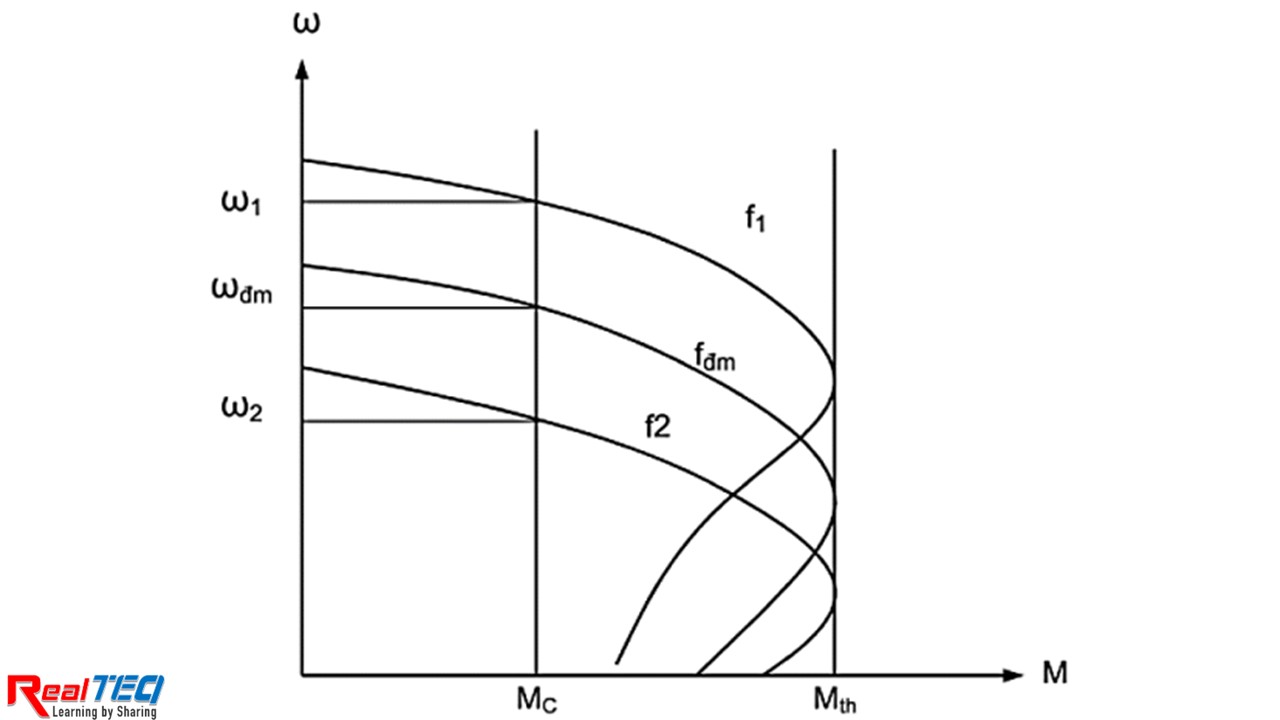
Hình 15. Đặc tính cơ khi thay đổi tần số.
4.4. Ảnh hưởng của số đôi cực p
Đối với những động cơ không đồng bộ rotor lồng sóc nhiều cấp tốc độ để điều chỉnh tốc độ người ta thay đổi thông số đôi cực của máy.
Khi thay đổi số đối cực p ta có:
{s_{th}} = \pm \frac{{{{R'}_2}}}{{{X_{nm}}}} = const{M_{th}} = \pm \frac{{3.U_1^2}}{{2.{\omega _0}.{X_{nm}}}} = constVới những động cơ mà thay đổi số đôi cực bằng cách thay đổi cách đấu các cuộn dây stator thì Mth có thể bị thay đổi. Họ đường đặc tính cơ thu được khi thay đổi p = 1; p = 2 và M = const.

Hình 16. Đặc tính cơ khi thay đổi số đôi cực p.